
パーテクチュアル株式会社
代表取締役社長 中村稔
金型関連のものづくりに20年従事し、会社の社長としてリーダーシップを発揮。金型工業会と微細加工工業会にも所属し、業界内での技術革新とネットワーキングに積極的に取り組む。高い専門知識と経験を生かし、業界の発展に貢献しております。
詳細プロフィールは⇒こちら

パーテクチュアル株式会社
代表取締役社長 中村稔
金型関連のものづくりに20年従事し、会社の社長としてリーダーシップを発揮。金型工業会と微細加工工業会にも所属し、業界内での技術革新とネットワーキングに積極的に取り組む。高い専門知識と経験を生かし、業界の発展に貢献しております。
詳細プロフィールは⇒こちら
埼玉県の金型工場、ニッシン・パーテクチュアルの代表、中村稔です。製造業における人手不足は、もはや「課題」ではなく「危機」です。熟練工が運搬作業に時間を取られていませんか?私の工場でもそうでした。そこで導入したのがAMR(自律走行搬送ロボット)です。本記事では、カタログスペックの話ではなく、実際に中小企業の狭い工場にAMRを導入し、試行錯誤した社長だからこそ語れる「2026年最新技術のリアル」と「失敗しない導入手順」を包み隠さずお伝えします。
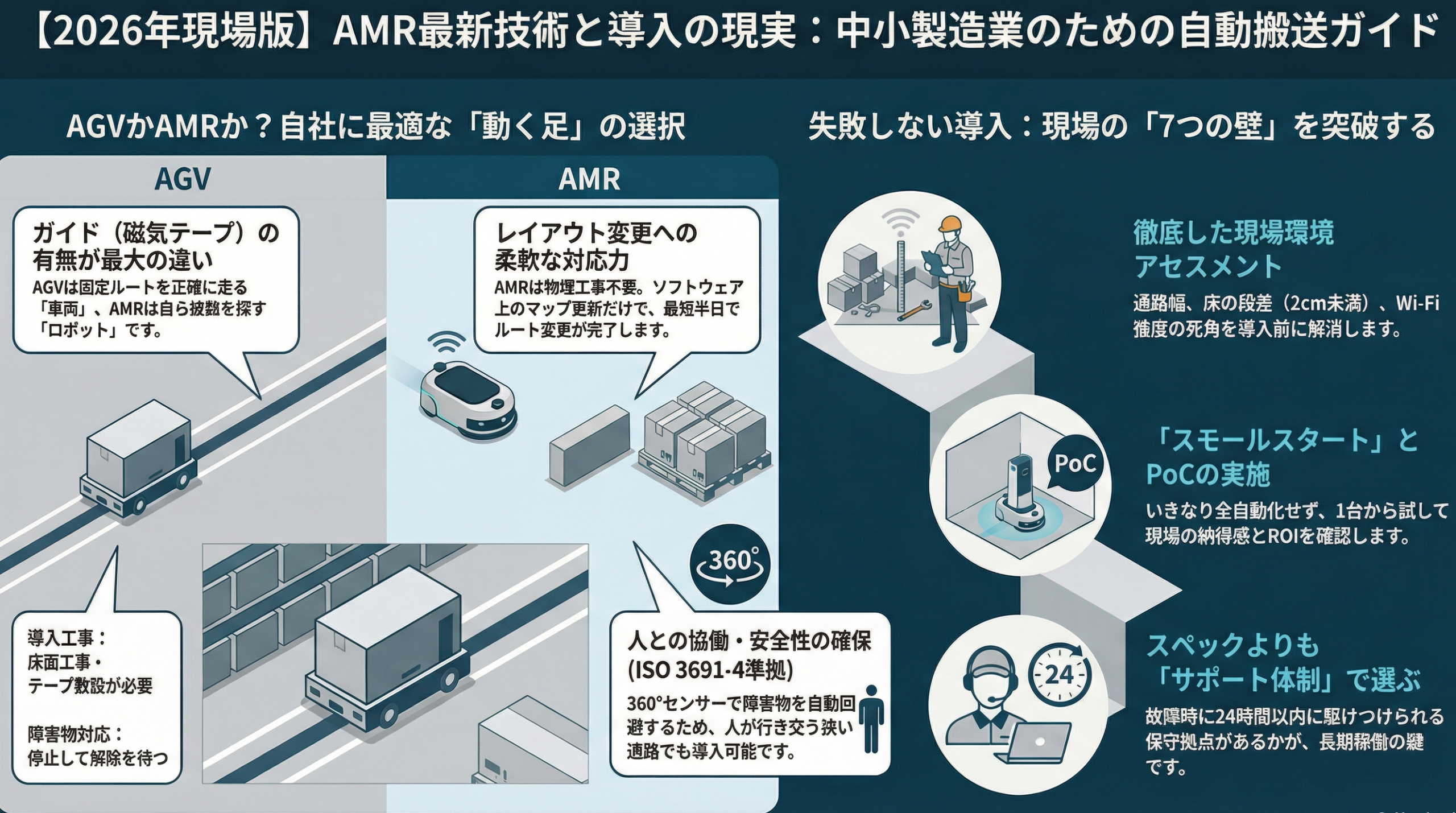
AMRと従来のAGV(無人搬送車)の最大の違いは、ガイドの有無による「自律性」です。AGVは磁気テープというレールの上しか走れませんが、AMRは内蔵された地図とセンサーで自分の位置を把握し、目的地まで自由に走行します。工場のレイアウト変更が頻繁な中小企業にとって、床工事不要でルートを変更できるAMRは、まさに現場のニーズに合致した搬送ソリューションといえるでしょう。
| 比較項目 | 従来のAGV(無人搬送車) | 最新のAMR(自律走行搬送ロボット) |
|---|---|---|
| 走行方式 | 磁気テープ・QRコード(ガイド必須) | SLAM技術(ガイドレス・自律走行) |
| ルート変更 | テープ貼り直し工事が必要(高コスト) | タブレットで地図更新のみ(低コスト) |
| 障害物対応 | 停止して人を待つ | 自動で回避ルートを生成して進む |
| 導入工事 | 床工事が必要 | 原則不要(Wi-Fi環境設定のみ) |
| 適した現場 | ライン生産・固定ルート | 多品種少量生産・レイアウト変更が多い現場 |
AMRの核心技術であるSLAM(Simultaneous Localization and Mapping)は、ロボット自身が周囲の環境を認識し、地図を作成する技術です。従来のAGVでは、レイアウト変更のたびに磁気テープの貼り直しという手間とコストが発生していました。
しかし、SLAM搭載のAMRなら、タブレット上で新しいルートを指定するだけで設定が完了します。私の工場のように多品種少量生産で、頻繁にワークの置き場や動線が変わる現場では、この柔軟性が工数削減に直結し、生産ラインの変更にも即座に対応できる最強の武器となります。
AMRは、進行方向に人や荷物があっても、センサーが検知して自動的に回避ルートを生成します。AGVは障害物があると停止してしまい、人が退かすまで復旧しませんでしたが、AMRは「止まらない」搬送を実現します。
例えば、狭い通路でフォークリフトが作業していても、AMRはその脇を安全な距離を保ってすり抜けていきます。人や物が絶えず動いている「動的環境」である工場内において、搬送を止めずにタクトタイムを守れる適応力は、生産効率維持のために必要不可欠な機能です。
導入コストを比較すると、機体単価はAGVの方が安価ですが、トータルコストで見るとAMRに軍配が上がるケースが多くあります。AGVは導入時のテープ敷設工事や、テープの摩耗による定期的なメンテナンス費用、レイアウト変更ごとの工事費がランニングコストとして積み重なります。
一方、AMRは初期投資こそ高いものの、環境構築はソフトウェア上で完結するため、追加の工事費がかかりません。長期的な運用と柔軟性を考慮すれば、中小企業にとってもAMRの方が投資対効果が高いという判断に至ることが多いのです。
NissinPertechtualからのアドバイス
 AIマスター 中村稔
AIマスター 中村稔「安いから」という理由だけでAGVを選ぶと、後々のレイアウト変更で痛い目を見ます。私たち中小企業こそ、変化に強いAMRを選ぶべきです。初期費用だけでなく「5年間で何回レイアウトを変えるか?」を計算に入れてみてください。
2026年のAMRは、単に「物を運ぶ」だけの装置から、高度な認識能力を持った「知的なパートナー」へと進化を遂げました。特にVisual SLAMや生成AIの搭載により、これまでロボット導入が難しいとされていた「散らかった現場」や「複雑な判断が必要な工程」でも活用が可能になっています。最新技術は、現場の混乱を吸収し、運搬作業の完全自動化を現実のものにします。
従来のレーザー(LiDAR)による計測に加え、カメラ映像を用いたVisual SLAM(V-SLAM)が主流になりつつあります。LiDARは足元の平面的な障害物検知は得意ですが、空中にある配線やガラス壁などの認識に弱点がありました。
V-SLAMは、人間と同じようにカメラで空間を三次元的に認識します。天井の高い倉庫や、特徴物の少ない長い廊下、さらには照明条件が変化する環境でも、自己位置を見失うことなく安定して走行できます。これにより、我々のような雑多な物が置かれた工場環境でも、ロボットが迷子になるリスクが激減しました。
最新のAMRには、エッジ(機体側)で処理を行うAIチップが搭載され、リアルタイムでの高度な判断が可能になりました。これまでのロボットは、予期せぬ障害物に出会うと停止して指令を待つだけでしたが、生成AIを活用した最新モデルは状況を解釈します。
「ここは通り抜けられないから、別の迂回ルートを探索しよう」といった判断を、クラウドを介さずその場で瞬時に行います。通信遅延のないエッジ処理により、フォークリフトが頻繁に行き交う危険なエリアでも、安全かつ最短の時間で目的地に到着する「熟練作業員のような動き」を実現しています。
台車型のAMRに協働ロボットアームを搭載した「モバイルマニピュレーター」の実用化が進んでいます。これまでのAMRは「A地点からB地点へ移動する」だけでしたが、これからは「棚から部品を取り出し、工作機械にセットする」というハンドリング作業まで自動化できます。
実際に私の工場でも、夜間の無人運転時に、加工済みのワークを回収し、次の素材をセットする作業への応用を検討しています。移動と作業を一台で完結できるこの技術は、究極の省人化、つまり「工場の完全自動化」へのラストワンマイルを埋める技術です。
NissinPertechtualからのアドバイス
AIマスター 中村稔最新技術は魅力的ですが、オーバースペックには注意が必要です。ただ運ぶだけならLiDARで十分な場合もあります。「自社の現場の課題は何か?」を明確にし、必要な技術だけを搭載したモデルを選定することが、コストを抑えるコツです。
メーカーのカタログには、ピカピカの平らな床を走るAMRしか載っていません。しかし、私たち中小企業の現場は、油汚れ、段差、狭い通路など、ロボットにとって過酷な環境です。導入後に「こんなはずじゃなかった」と後悔しないためには、現場特有の課題を直視し、それに対応できるスペックや周辺技術を選定する必要があります。
中小企業の現場チェックリスト
工場の床は、グレーチングの溝や配線カバー、経年劣化によるひび割れなど、意外と凹凸が多いものです。一般的な屋内用AMRは、わずか1cmの段差でスタックすることがあります。
選定時は、サスペンション機能や大径ホイールを搭載した走破性の高いモデルを選ぶべきです。また、通路幅がギリギリの現場では、その場で旋回できる「スピンターン機能」が必須です。実際にデモ機を走らせ、自社の床環境で止まらずに走行できるか、足回りの強さを徹底的に確認することが導入成功の第一歩です。
AMRの運用において、通信断絶は致命的です。金属加工工場では、大型機械や金属製の棚が電波を遮断し、Wi-Fiの「死角」が生まれやすくなります。通信が切れると、ロボットは立ち往生し、生産ラインが止まります。
この解決策として注目されているのが「ローカル5G」や、メッシュWi-Fiの活用です。特にローカル5Gは、工場敷地内に専用のネットワークを構築でき、低遅延で多数同時接続が可能です。安定した通信環境を整えることは、ロボットの性能をフルに発揮させるための土台となります。
引用:総務省「ローカル5G導入に関するガイドライン」
https://www.tele.soumu.go.jp/resource/j/system/ml/mobile/local5g/l5g_guideline.pdf
人手不足解消のためにロボットを入れたのに、バッテリー交換や充電プラグの抜き差しに人が手間を取られては本末転倒です。そこで有効なのが、非接触のワイヤレス給電システムです。
待機場所や作業ポイントの床に送電パッドを埋め込んでおけば、ロボットがそこに停まるだけで自動的に充電されます。作業の合間にこまめに充電する「機会充電」を行うことで、バッテリー切れの心配なく24時間連続稼働が可能になります。人の手を一切介さないエネルギー管理こそが、真の自動化への鍵です。
NissinPertechtualからのアドバイス
AIマスター 中村稔ショールームで動いても、自社の工場で動くとは限りません。必ずメーカーに「デモ機を1週間貸してほしい」と依頼し、実際の油まみれの床や狭い通路でテストしてください。そこで止まらないロボットこそが本物です。
AMRは柵で囲わずに人と共存するため、極めて高い安全性が求められます。2020年に発行された国際規格「ISO3691-4」は、無人搬送車システムの安全要求事項を定めており、これに準拠した運用が必須です。メーカー側の安全機能に頼るだけでなく、導入する我々ユーザー側も、現場環境に応じたリスクアセスメントを実施し、作業員が安心して働ける環境を作る責任があります。
AMRには、足元を360度監視するセーフティレーザースキャナが標準装備されています。これは、障害物との距離に応じて「減速」や「停止」を行う安全の要です。
ISO規格に対応した最新モデルでは、この検知エリア(保護領域)を走行速度や舵角に応じて動的に変化させます。高速走行時は遠くから検知して緩やかに減速し、狭い場所での低速走行時は検知エリアを狭めて不要な停止を防ぐ。このように、安全性と生産性を両立させる高度な速度制御機能が、人とロボットの安全な共存を実現しています。
レーザースキャナは水平方向の検知は得意ですが、フォークリフトの爪や、飛び出したパイプなど、スキャナの高さ以外の障害物は検知できません。これを見逃すと衝突事故に繋がります。
そこで重要になるのが、3Dカメラによる立体的な障害物検知です。最新のAMRは、進路上の空間をリアルタイムでスキャンし、高さのある障害物や、床に落ちている小さな部品も認識します。「ぶつからない」だけでなく、安全に通過できるスペースを自ら判断して回避ルートを生成する能力が、現場事故ゼロを達成します。
安全なロボットを買えば安全が保証されるわけではありません。運用するのは現場の人間だからです。交差点での出会い頭の衝突リスクや、通路幅に対する退避スペースの確保など、自社の環境特有のリスクを洗い出す「リスクアセスメント」が不可欠です。
厚生労働省も機能安全活用による労働災害防止を推奨しています。我々の現場では「ロボット接近時は人が道を譲るのではなく、ロボットが一時停止する」というルールを徹底しました。運用ルールと物理対策の両輪で、安全管理を行う必要があります。
引用:厚生労働省「機能安全による機械等の安全確保について」
https://www.mhlw.go.jp/stf/seisakunitsuite/bunya/0000140176.html
NissinPertechtualからのアドバイス
AIマスター 中村稔安全機能は「止まるため」にありますが、止まりすぎて仕事にならないのも困ります。ISO規格に準拠しつつ、自社の運用ルール(人がロボットを避けるのではなく、ロボットが人を避ける設定など)を明確にすることが、現場のストレスを減らす秘訣です。
いきなり「ロボットを買う」ことから始めてはいけません。それは失敗への特急券です。私も最初はどのロボットが良いかばかり気にしていましたが、重要なのは「自社の工程のどこにフィットするか」を見極めることでした。現状分析から始まり、スモールスタートで徐々に拡大していく。ニッシン・パーテクチュアルが実際に踏んだ手順をもとに、確実な導入成功へのロードマップを5つのステップで解説します。
まずは、現場の搬送作業をすべてリストアップし、「誰が」「何を」「どこへ」「どれくらいの頻度で」運んでいるかを可視化しました。すると、熟練工が1日のうち1時間を「スクラップ廃棄」や「空箱の回収」に使っていることが判明しました。
高付加価値な作業ではなく、こうした「単純・重労働・高頻度」な移動こそが、AMRに置き換えるべき工程です。すべての搬送を自動化するのではなく、ロボットに任せることで最大の効果が得られるボトルネック工程を特定することが、最初のステップです。
候補のAMRを選定したら、必ず現場でPoC(概念実証)を行います。ここで見るべき指標は、最高速度ではなく「エラー停止の回数」と「復帰の容易さ」です。
特定の場所で毎回止まるなら、センサーの死角や床の問題があります。また、停止した際に現場のパートさんがワンタッチで復旧できるかも重要です。復旧に専門知識が必要だと、結局管理者が呼び出され、手間が増えてしまいます。「現場の誰もが扱える使いやすさ」こそが、定着するための必須条件だと痛感しました。
「ロボットが入ると私たちの仕事がなくなるの?」という現場の不安を解消することは、機能選定以上に重要です。私は社員に対し、「ロボットは君たちの仕事を奪うのではなく、重い物を運ぶ苦役を代行する『後輩』だ」と説明しました。
実際に導入する際は、ロボットに「白猫」「黒猫」と愛称をつけ、親しみを持たせました。社員がロボットの通り道を片付けたり、動きを見守ったりするようになれば成功です。テクノロジーを使いこなすのは人間であり、現場の「受容文化」を醸成することが、導入成功の鍵を握っています。
最初から工場全体を自動化しようとすると、システムが複雑になりすぎて挫折します。まずは1台、特定のA地点からB地点への搬送というシンプルなルートから始めました。そこで運用ノウハウを蓄積し、2台、3台と増やしていくのが賢明です。
台数が増えた段階で、複数のロボットを統括制御する「フリートマネジメントシステム」を導入します。これにより、交差点での譲り合いや、最適な配車が自動化され、効率が飛躍的に向上します。小さく生んで大きく育てる戦略が、リスクを最小限に抑えます。
AMRが稼働し始めると、予期せぬトラブルは必ず起きます。Wi-Fiが切れた時、荷物が崩れた時、誰がどう対応するか。明確な「運用ルール」と「トラブルシューティングマニュアル」を作成しました。
また、社内に「ロボット担当者」を任命し、簡単なトラブル対応やルート変更ができるように教育しました。メーカーのサポートに頼るだけでなく、自分たちで一次対応できる体制を整えることで、ダウンタイムを最小限にし、ロボットを工場のインフラとして定着させることができます。
NissinPertechtualからのアドバイス
AIマスター 中村稔ロボットに名前をつける。これは冗談のようで本当に効果があります。無機質な機械番号で呼ぶより、「シロちゃんが困ってるから道を開けてあげよう」と現場の意識が変わります。導入は「技術」半分、「心理」半分です。
経営者として最も気になるのは「投資回収」です。AMRは決して安い買い物ではありませんが、労働力不足という経営リスクを回避する投資でもあります。単なる人件費の削減だけでなく、生産性の向上や品質安定化といった波及効果を含めてROI(投資対効果)を算出する必要があります。さらに、国や自治体の補助金を賢く活用することで、実質的な負担を大幅に減らし、早期の投資回収を実現する戦略をお話しします。
AMR導入の効果は「運搬工数の削減」として明確に数字に表れます。時給1,500円の作業員が1日2時間運搬していたなら、年間で約70万円以上のコスト削減になります。
しかし、真の価値はそれ以上です。運搬から解放された熟練工が、段取りや検査といった付加価値の高い業務に集中できるようになり、機械の稼働率が向上しました。さらに、重い荷物を持たなくて済むため、従業員の疲労が減り、定着率も向上します。「見えないコスト」の削減効果も含めて評価することで、AMR導入の真のメリットが見えてきます。
【試算例】時給1,500円のスタッフが1日2時間運搬していた場合
中小企業庁などは、生産性向上を目指す設備投資を強力に支援しています。特に「中小企業省力化投資補助金」は、カタログから選ぶ簡易な申請プロセスで、搬送ロボットの導入費用の1/2などを補助してくれます。
また、より大規模なシステム構築には「ものづくり補助金」が有効です。私たちはこれらを活用し、導入コストを大幅に抑えました。こうした制度は公募時期が決まっているため、常に最新情報をチェックし、認定支援機関と連携して申請準備を進めることが、賢い経営判断といえます。
引用:中小企業庁「中小企業省力化投資補助金」
AMRの技術進化は日進月歩です。5年も経てば旧式化するリスクがあります。そのため、あえて「購入」せず「リース」や「RaaS(Robot as a Service:サブスクリプション)」を利用するのも有効な戦略です。
リースなら初期費用を抑えられ、契約期間終了後に最新機種に入れ替えることが容易です。一方で、税制優遇(即時償却など)を活用して利益圧縮を図りたい場合は「購入」が有利です。自社のキャッシュフローと、技術の陳腐化リスクを天秤にかけ、最適な調達方法を選択してください。
NissinPertechtualからのアドバイス
AIマスター 中村稔補助金は「採択されたらラッキー」ではなく、「事業計画の一部」として組み込むべきです。ただし、補助金ありきで不要なスペックまで盛るのはNG。あくまで自社の利益を生むための投資であることを忘れないでください。
AMRは魔法の杖ではありません。導入すれば勝手に全てが解決するわけではなく、現場の環境整備や運用ルールの徹底といった、人間の努力があって初めて機能します。しかし、正しく導入すれば、24時間文句も言わず働き続ける、中小製造業にとってこれ以上ない「最強の相棒」となります。2026年、最新技術は私たちの手の届くところにあります。まずは現状分析から、自動化への一歩を踏み出してみませんか。



コメント